最近因为要给学弟们讲课,重读了PRML第四章,把之前没读懂的都弄懂了,收获很大,现做个总结。
分类问题的方法可归结三类:判别公式(Discriminant function),生成模型(Generative model)和判别模型(Discriminative model)。后两者都是在概率框架下对概率分布进行建模,区别在于建模对象的不同,之后再详细讲。使用判别公式就相对比较简单粗暴,就是学习一个映射函数,直接将样本映射到标签。
分界面
二分类
对于二分类问题,判别公式的一般形式为:
两类之间的分界面为:
下图展示了二维平面上的分界面效果及一些性质。
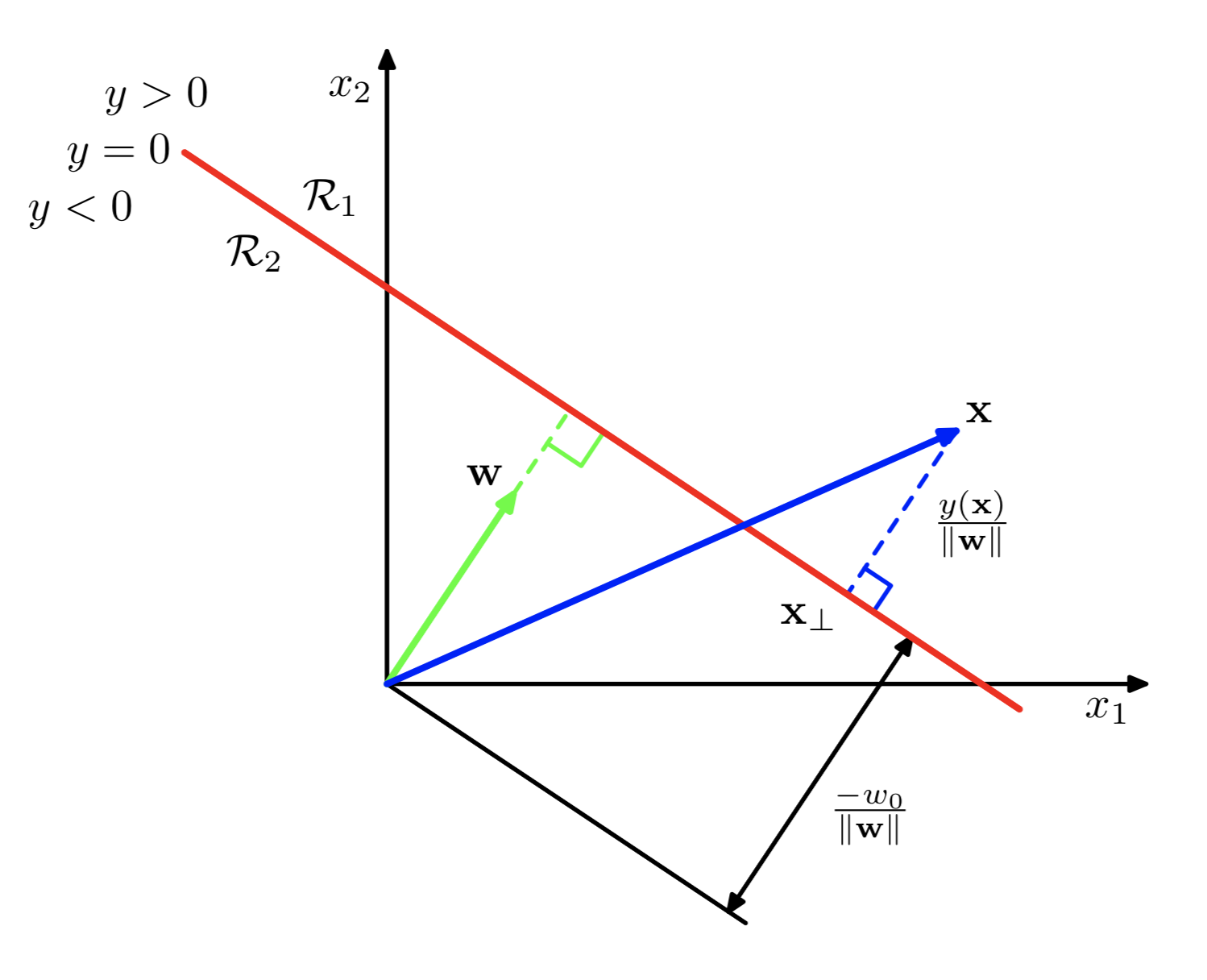
对于平面中的任意一点$\mathbf{x}$,有
利用(2),可得打每个点$\mathbf{x}$到分界面的距离:
多分类
对于多分类问题,构建分界面有几种不同方案
- One vs Rest:每类和剩下的所有类作分类,构建$K-1$个分类器
- One vs One:每两类之间构建一个分类器,共$K(K-1)/2$
- 构建K个分类器,类似于softmax,每个分类器输出一个得分,将样本预测为得分最高的那一类
前两种方法都存在一定缺陷:
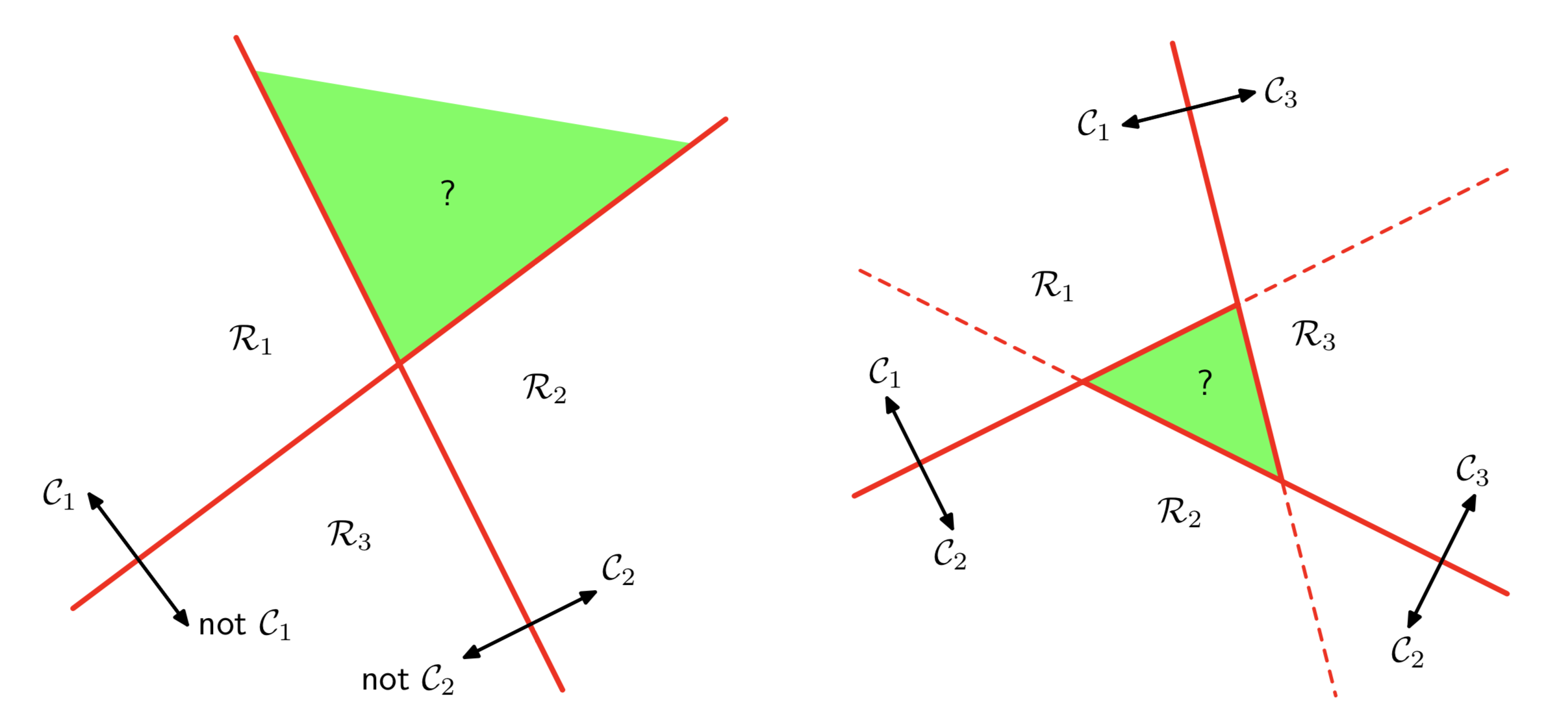
上图左是One vs Rest方法,当两个分类器的分类结果是Yes C1,Yes C2时,无法区分是哪一类,即图中的绿色区域。上图右表示One vs One方法,采用投票的方法确定最后的结果,但是当预测结果轮换时(即classifier(C1, C2) -> C2, classifier(C2, C3) -> C3, classifier(C1, C3) -> C1),无法确定样本属于哪一类。
因以上原因,实际多分类问题中一般采用第3中方式进行多分类。对于K分类问题,其判别公式一般形式为:
任意两类$k,j$之间的分界面为:
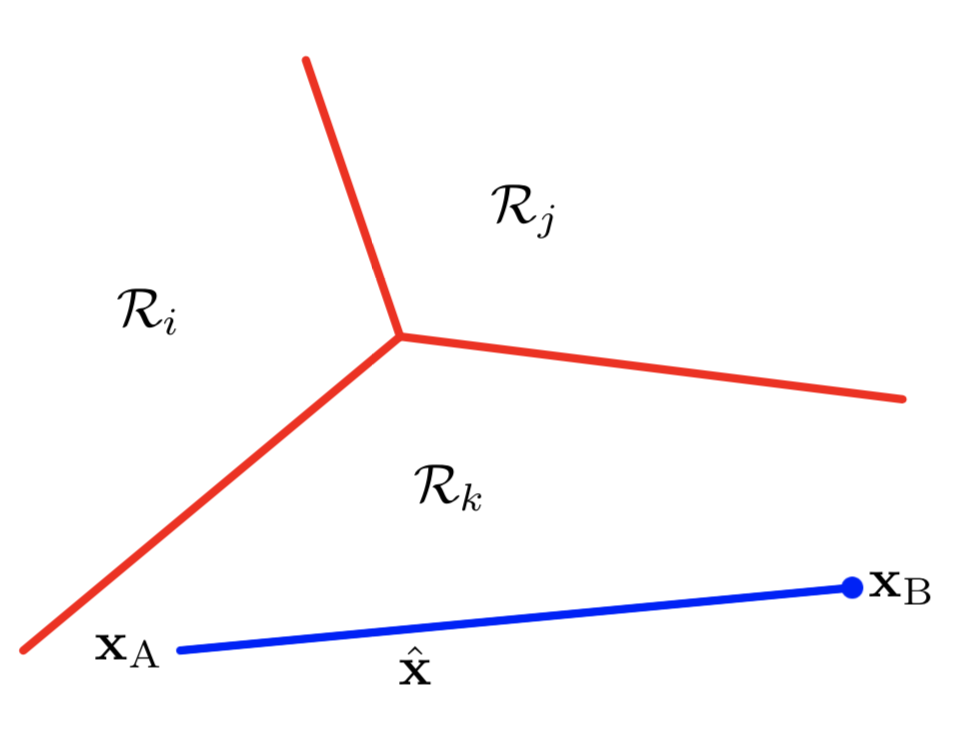
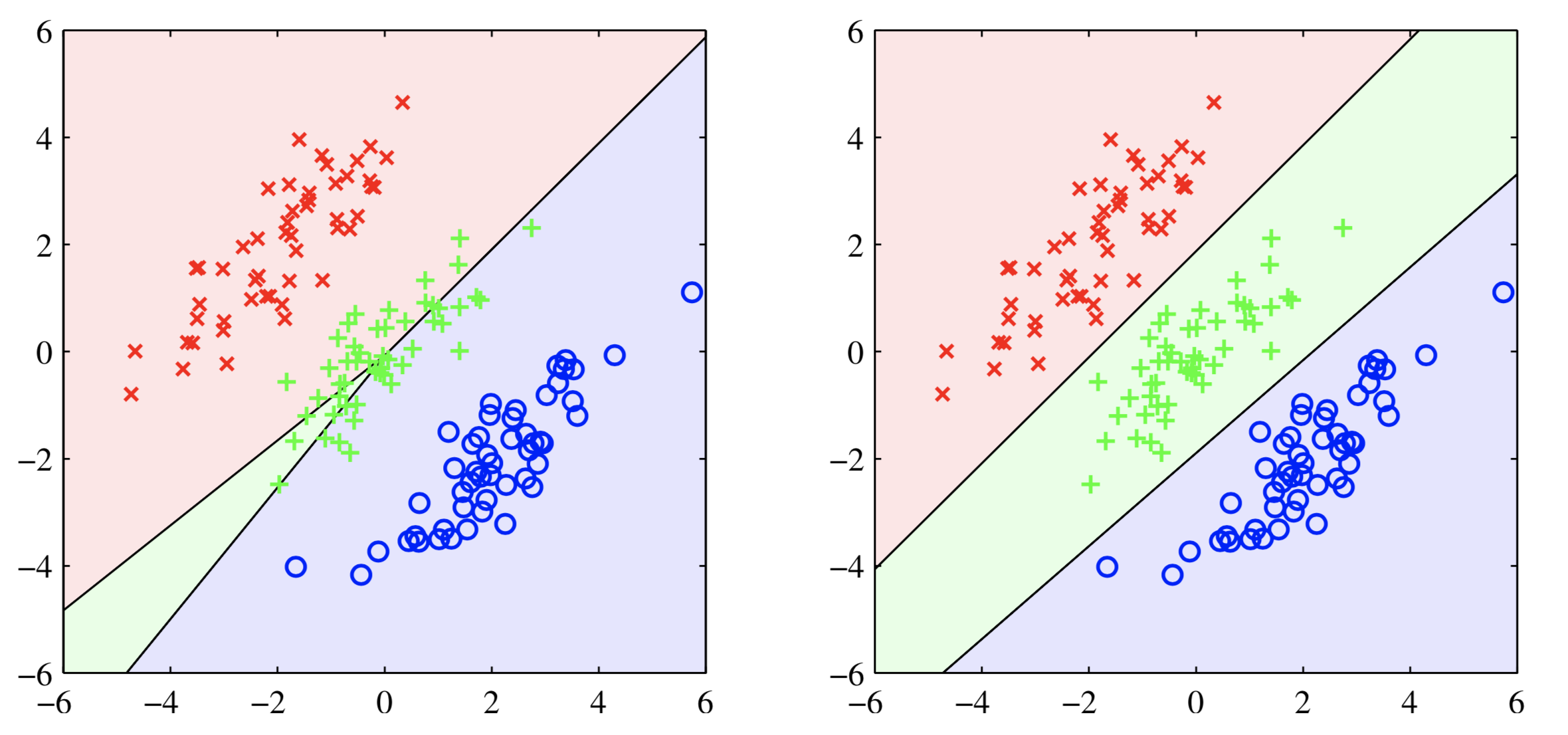
下图展示了分界面效果:
几种分类方法
为后文公式书写方便,对于(1)(3)中判别公式采用以下方式简写:
这种方法将偏置当做$\mathbf{w}$中的一维,其对应维中的$\mathbf{x}$取值为1。
Least squares
一种很容易想到的方法就是用最小二乘法求解多分类问题,像线性回归一样。
其优化目标是:
其解为:
最小二乘法存在两个缺点:
- 对噪声敏感
- 在分类问题上最小二乘法的假设不合理,在很多问题上会失败
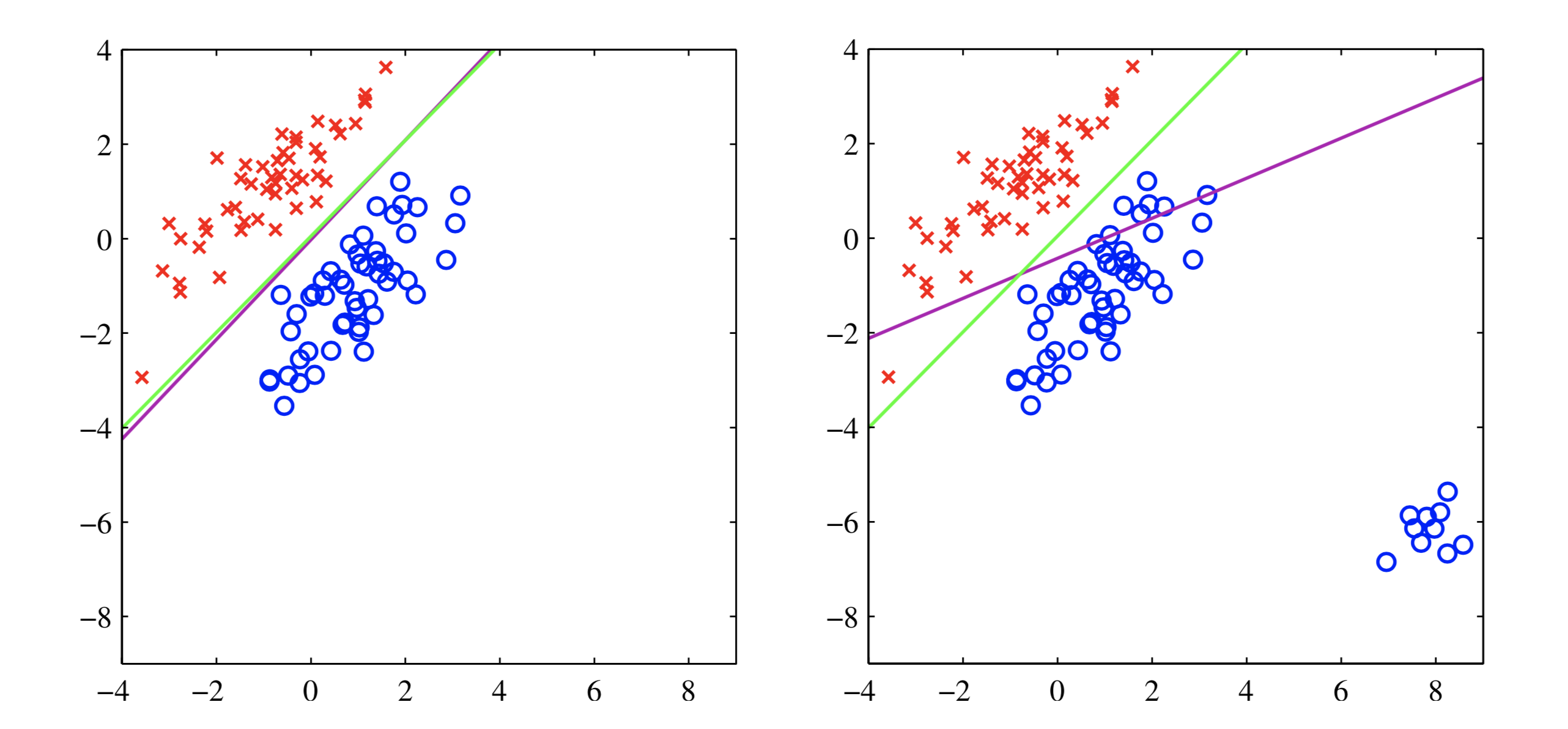
上图反映了最小二乘法对噪声敏感的问题,在右图中,存在一小撮距离较远的点(右下角蓝色),为了使有这一小撮点到分界面的距离(不是垂直距离,是y-y(x)的距离)尽量小(优化目标),分界面会大幅倾斜。
上图反映了最小二乘法分类失败的情景。理想情况下最优的分界面是右图,但是使用最小二乘法只能得到左图的分界面,原因在于最小二乘法基于高斯假设,即假设模型误差服从高斯分布。在这种情况下$p(t|x)$也是服从高斯分布,概率等值线如下:
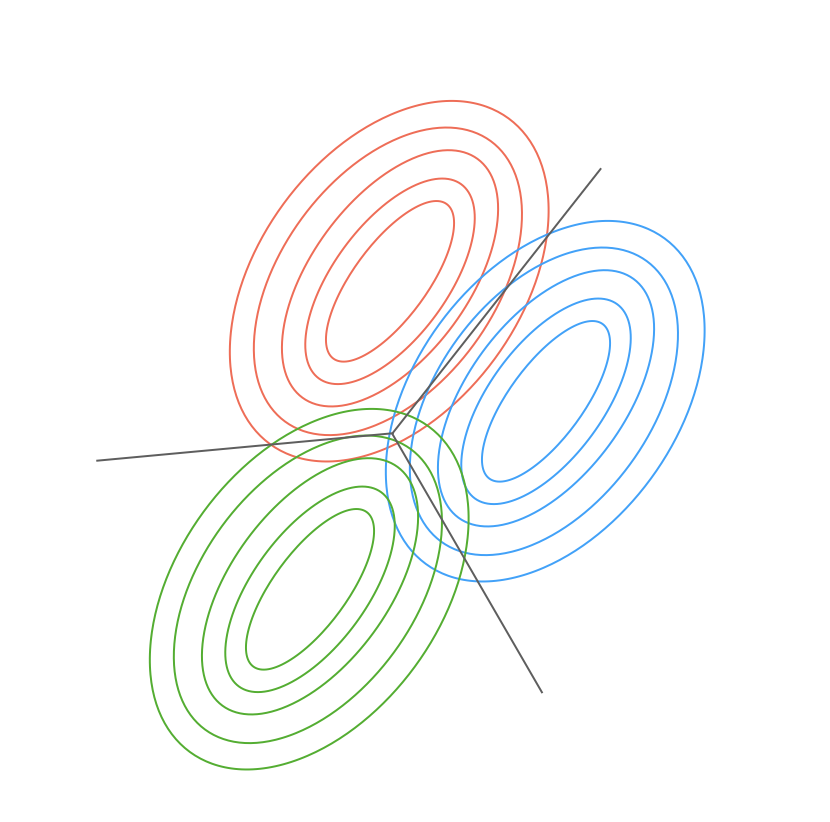
其分界面是$p(t=1|x) = p(t=0|x)$,如上图所示。直观上理解,误差服从高斯分布显然也是不合理的,因为类别标签是0、1,不是连续的。
Fisher’s Linear Discriminant(LDA)
二分类
线性二分类可看成两步:
- $y(x)=\mathbf{w^{T}x}$将样本$\mathbf{x}$映射到一维
- 在一维上分类,$y(x)\geq y_0$属于正类,$y(x)<y_0$负类
如果要分类的好,一个朴素的想法就是让样本映射到一维空间后可以分得很开。
假设两类点的中心分别是:
则投影之后类别中心是:
则优化目标为:
使用拉格朗日乘子法:
求得:
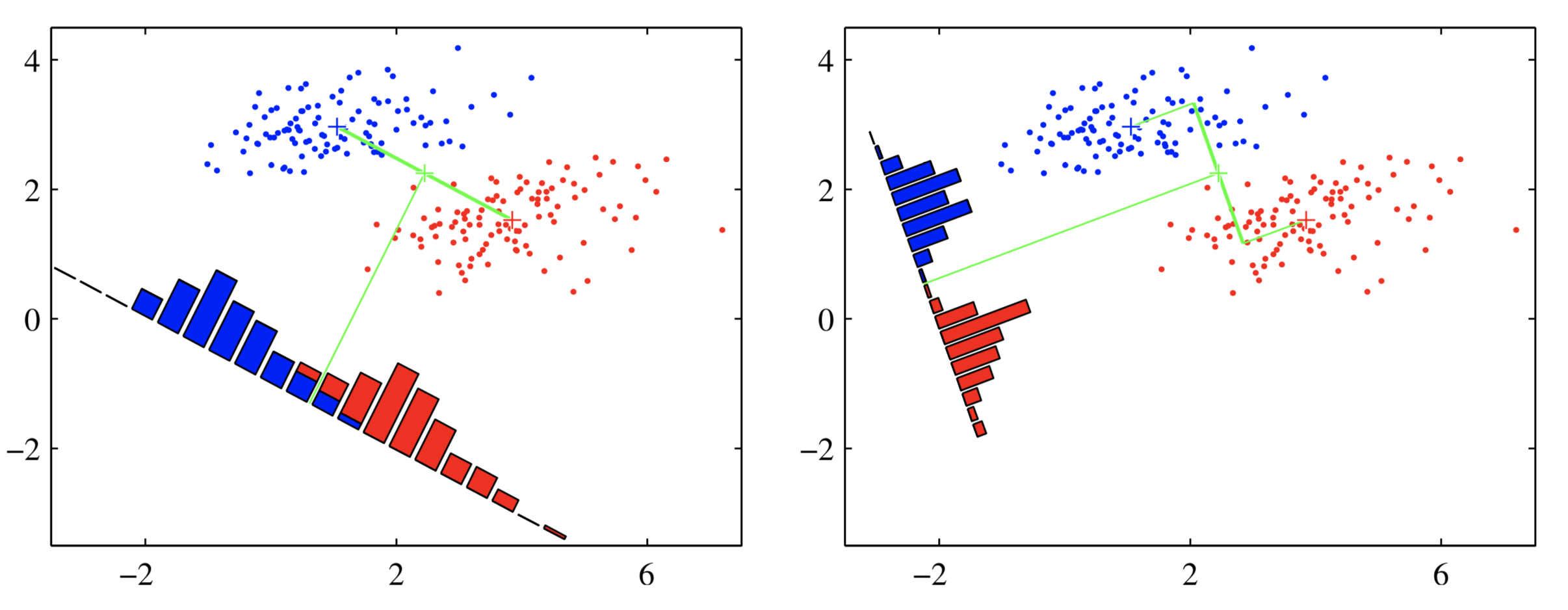
上面左图反映了投影结果,可以看出,仅考虑类中心的距离会导致投影后样本有很多重叠,原因是样本集的协方差不是对角阵。LDA的不仅考虑了类别之间的距离,也考虑了类内的方差。其优化目标是:
其中$s_1, s_2$表示类内方差,定义为:
$\mathbf{S_B,S_W}$定义为:
式(6)对$\mathbf{w}$求导得到:
即:
当$\mathbf{S_W}$是对角阵并且对角元素都相等的时候(isotropic covariance),$\mathbf{w \propto (m_2-m_1)}$。
投影之后,可看做一维空间上的分类问题,通过决策理论选择一个阈值后即可构建一个分类器。
多分类
对于K分类问题,类内方差定义为:
总方差是:
将总方差拆分成两项:
将其中$\mathbf{S_B}$当做类间方差:
得到类内方差和类间方差后通过可构建以下优化目标:
该优化目标的解是$\mathbf{S_W^{-1}S_B}$的最大的D个特征值对于的特征向量,D为最后的降维维数。因为(8)由K
个秩为1的矩阵构成,并且因为(7),自由度仅为K-1,因此$\mathbf{S_B}$的秩最多为K-1,所以$D\leq K-1$。
感知机
感知机采用+1、-1作为类别标签,模型如下:
如果采用分错数量作为损失,最后的损失函数曲线是分段常数函数(piecewise constant),即每一段都是平的,导数为0,无法优化。感知机采用以下方式作为损失函数,这样最后的损失函数为分段线性(piecewise linear):
对于分错样本$\mathbf{x}_n$,损失$-\mathbf{w}^{T}\mathbf{x}_nt_n > 0$,对于分对样本,损失为0。
使用梯度下降法更新,更新方法如下:
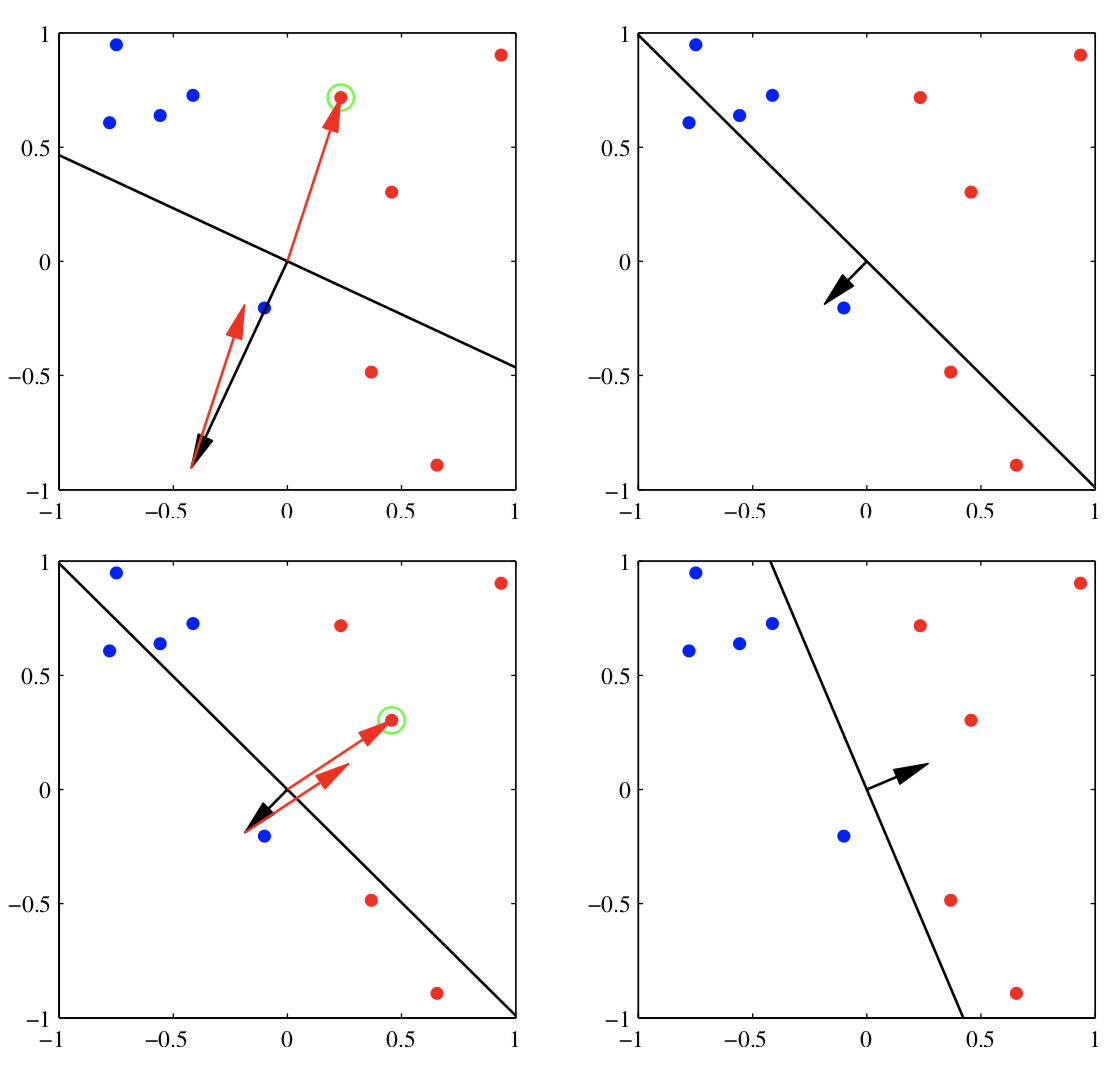
通过上图可以直观理解感知机算法原理。当一个样本$\mathbf{x}_n$分错时,如果是正样本,$\mathbf{w}^{\tau + 1}=\mathbf{w}^{\tau} + \mathbf{x}_n$,如果是负样本,$\mathbf{w}^{\tau + 1}=\mathbf{w}^{\tau} - \mathbf{x}_n$(这里$\eta = 1$)。上图中绿色的圈表示分错了,$\mathbf{w}$加上样本后分界面就会得到纠正。
感知机算法的好处是其收敛性有保证:如果数据能够线性可分,感知机算法能保证收敛。但是,感知机也存在一些缺点。
- 即使在线性可分的情况下,感知机的收敛性能够得到保证,但是可能会收敛很慢
- 数据是否线性可分无法判断,感知机的优势其实不明显
- 不太容易拓展到多分类情况